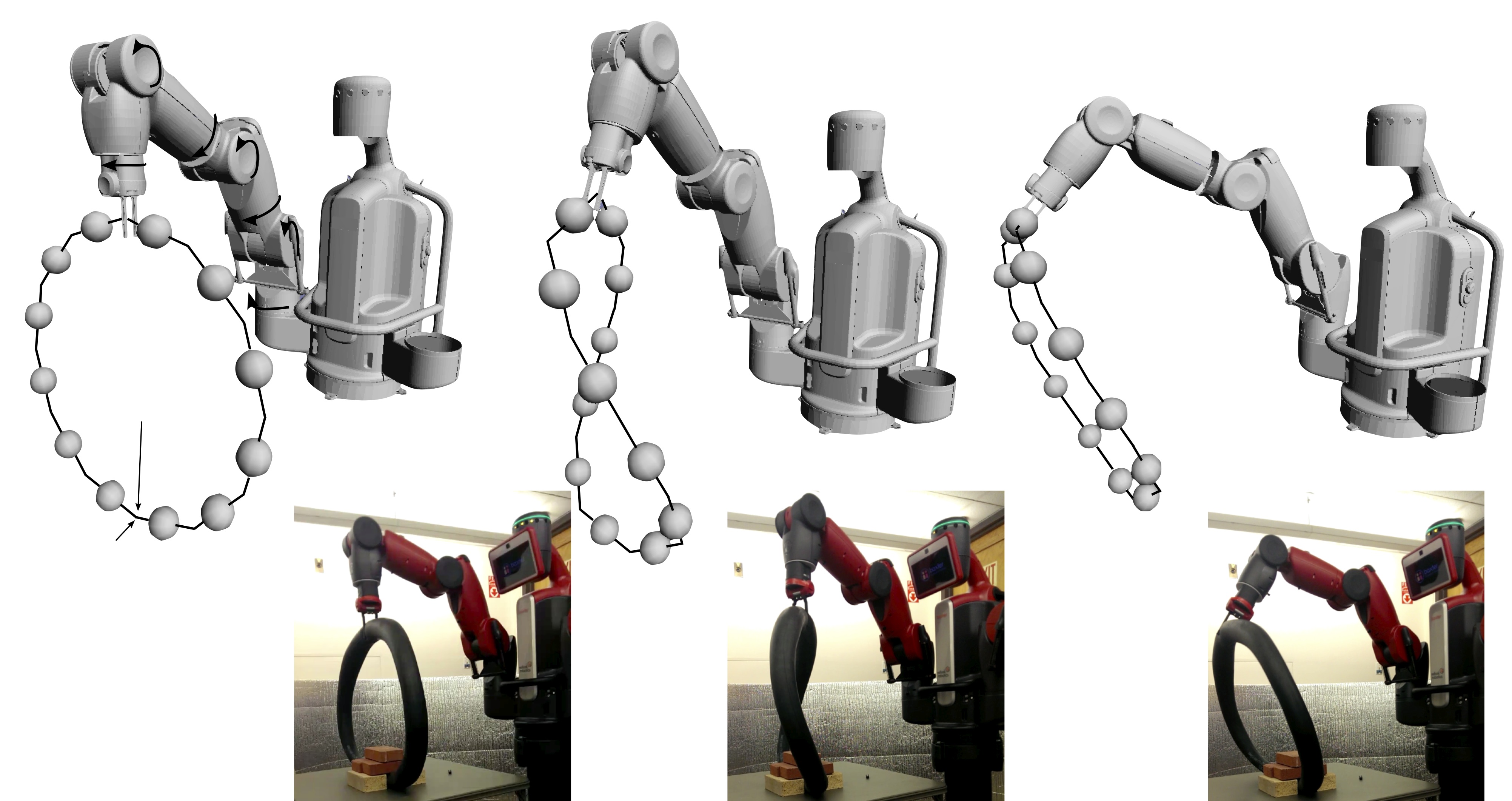
 The goal of this work is to use a robotic manipulator to determine model properties of flexible objects through touch alone. In the graphic to the right, we use Rethink Robotic’s Baxter robot to twist, bend, and deform an inflated rubber tube (aka bicycle tube) in order to measure the tube’s stiffness properties. The tube’s deformation depends on Baxter’s end effector’s position and orientation in space as well as the force and torque it applies to the tube. This information can be calculated by measuring Baxter’s arm’s joint angles and joint torques. With a model of Baxter deforming the tube, we can identify the model properties that best match the measured joint torques and angles using techniques from optimal controls.
The goal of this work is to use a robotic manipulator to determine model properties of flexible objects through touch alone. In the graphic to the right, we use Rethink Robotic’s Baxter robot to twist, bend, and deform an inflated rubber tube (aka bicycle tube) in order to measure the tube’s stiffness properties. The tube’s deformation depends on Baxter’s end effector’s position and orientation in space as well as the force and torque it applies to the tube. This information can be calculated by measuring Baxter’s arm’s joint angles and joint torques. With a model of Baxter deforming the tube, we can identify the model properties that best match the measured joint torques and angles using techniques from optimal controls.
Future work will look into multiple experiments to validate the identification using a second arm. For instance, one arm twists the tube while the second probes for a location on the tube using the prediction from the model. This additional measurement could further refine the identification. Multiple measurements like the one just suggested are necessary for objects with sufficiently complex geometries or nonuniform stiffness. Ultimately, we plan to integrate vision to the identification procedure as well.
This project has three main components:
- Object and manipulator model and simulation
- Optimal Parameter Identification
- Results using Baxter
Please see the following videos for more information.
Relevant Videos:
|
|
|
|
An explanation of the project, with a side-by-side comparison of the model and experiment. The video is narrated by my postdoctoral advisor, Nikolaus Correll. |
A simulation of Baxter manipulating a flexible tube approximated by 12 links connected by springs. The simulation was done in trep. Baxter’s meshes are from https://github.com/RethinkRobotics. |
Relevant Papers:
- [1]
- T.M. Caldwell, D. Coleman, and N. Correll. Optimal Parameter Identification for Discrete Mechanical Systems with Application to Flexible Object Manipulation, IEEE/RSJ International Conference on Intelligent Robots and Systems. (Submitted) [link]
