 Planning for agile maneuvers around obstacles can be challenging to efficiently explore the obstacle-free space while also being computationally efficient.
Planning for agile maneuvers around obstacles can be challenging to efficiently explore the obstacle-free space while also being computationally efficient.
With this work I look to merge ideas from control theory (e.g. reachability theory) and planning (e.g. rapidly exploring random trees) in the hope to extend planning to high dimensional, underactuated systems with complex dynamics.
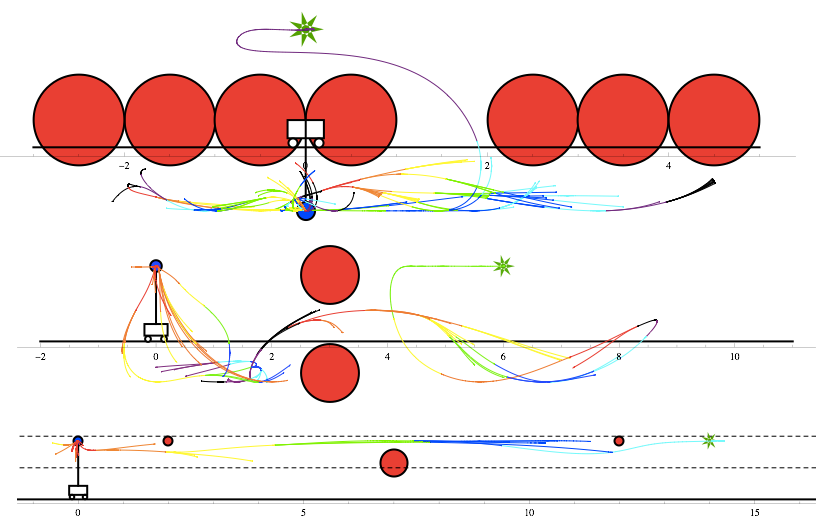
The examples on this page are of a pendulum on a cart that must reach a final state (labelled with a green star) while the pendulum head avoids the obstacles. The paths found for three different problems are shown. The coloring corresponds to the depth in the tree the path is and the obstacles are in red.
This project has three main components:
- Efficient nearest neighbor calculation.
- Novel trust region approach for extending to nonlinear systems.
- Handling numerical issues associated with system instabilities.
Please see the following videos for more information.
Relevant Videos:
|
|
|
|
The goal is to discover a state and control trajectory that takes the two-link pendulum on a cart to the desired stable equilibrium point while the two pendulum heads avoid the obstacles. |
|
|
|
|
|
Three pendulum on the cart obstacle avoidance problems with solutions shown. The goal is to discover a state and control trajectory that takes the system to the desired stable equilibrium point while the pendulum head avoids the obstacles. |
|
|
|
|
|
Four differing paths found for a pendulum on the cart pathing through a corridor. Each path must take the system to the desired state while keeping the pendulum head collision free. |
Relevant Papers:
- (coming soon!)
